博客地址:https://www.cnblogs.com/zylyehuo/
第一种方法
通过settings.json配置“subwindows”字段去显示

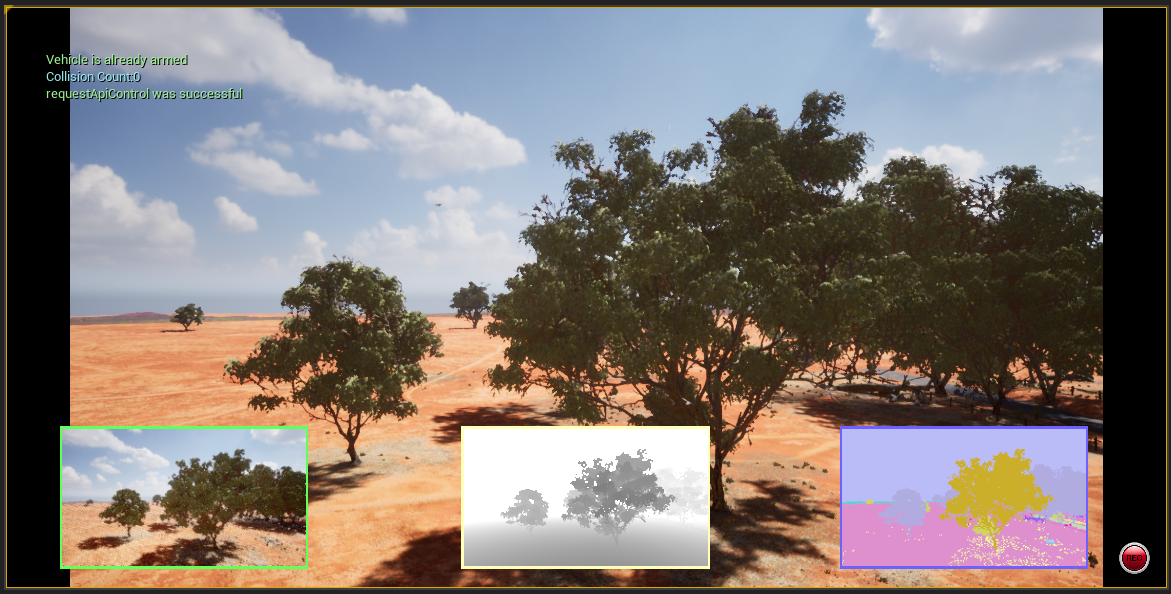
settings.json
{"SettingsVersion": 1.2,"SeeDocsAt": "https://github.com/Microsoft/AirSim/blob/master/docs/settings.md","SimMode": "Multirotor","ViewMode": "FlyWithMe","SubWindows": [{"WindowID": 0,"CameraName": "front_center_custom","ImageType": 0,"Visible": true,"ImageSize": [480, 270],"CameraPosition": [0.0, 0.0, -2.5],"CameraRotation": [0.0, 0.0, 0.0]},{"WindowID": 1,"CameraName": "front_center_custom","ImageType": 3,"Visible": true,"ImageSize": [480, 270],"CameraPosition": [0.0, 0.0, -2.5],"CameraRotation": [0.0, 0.0, 0.0]},{"WindowID": 2,"CameraName": "front_center_custom","ImageType": 5,"Visible": true,"ImageSize": [480, 270],"CameraPosition": [0.0, 0.0, -2.5],"CameraRotation": [0.0, 0.0, 0.0]}],"Vehicles": {"Drone": {"VehicleType": "SimpleFlight","DisplayName": "My First Drone","AutoCreate": true}}
}
第二种方法
利用pygame绘制窗口并获取无人机FPV实时图像呈现
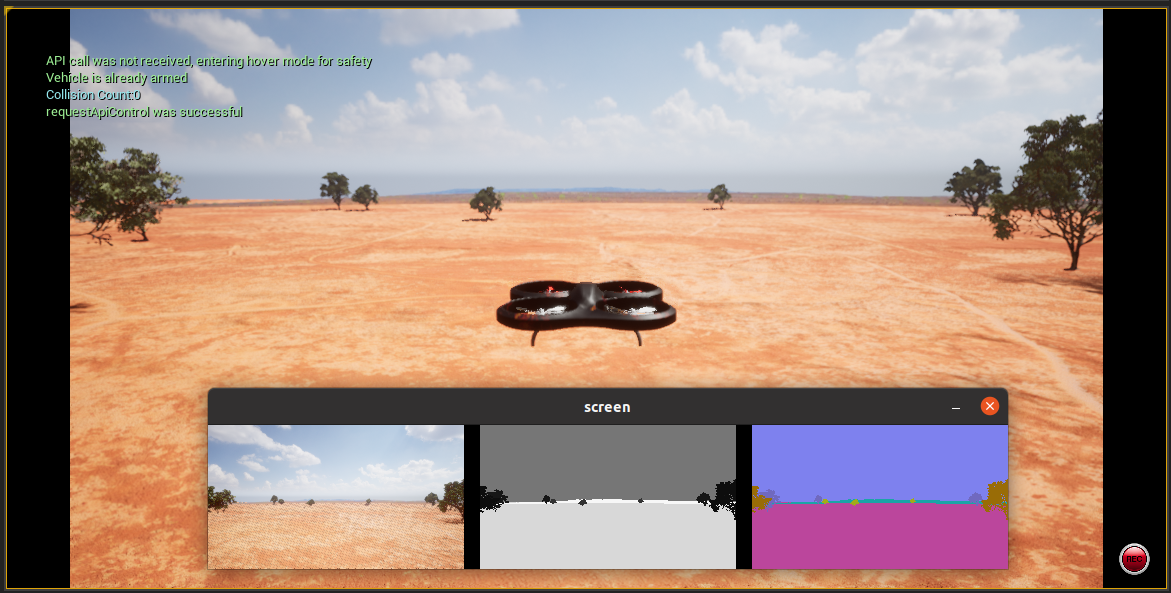
键盘控制及摄像机实时显示.py
import sys
import time
import airsim
import pygame
import cv2
import numpy as np# >------>>> pygame settings <<<------< #
pygame.init()screen = pygame.display.set_mode((800, 144))
pygame.display.set_caption("screen")
screen.fill((0, 0, 0))# >------>>> AirSim settings <<<------< #
# 这里改为你要控制的无人机名称(settings文件里面设置的)
vehicle_name = "Drone"
AirSim_client = airsim.MultirotorClient()
AirSim_client.confirmConnection()
AirSim_client.enableApiControl(True, vehicle_name=vehicle_name)
AirSim_client.armDisarm(True, vehicle_name=vehicle_name)
AirSim_client.takeoffAsync(vehicle_name=vehicle_name).join()
image_types = {"scene": airsim.ImageType.Scene,"depth": airsim.ImageType.DepthVis,"seg": airsim.ImageType.Segmentation,"normals": airsim.ImageType.SurfaceNormals,"segmentation": airsim.ImageType.Segmentation,"disparity": airsim.ImageType.DisparityNormalized,"Infrared": airsim.ImageType.Infrared
}# 基础的控制速度(m/s)
vehicle_velocity = 2.0
# 设置临时加速比例
speedup_ratio = 10.0
# 用来设置临时加速
speedup_flag = False# 基础的偏航速率
vehicle_yaw_rate = 5.0while True:yaw_rate = 0.0velocity_x = 0.0velocity_y = 0.0velocity_z = 0.0time.sleep(0.02)for event in pygame.event.get():if event.type == pygame.QUIT:sys.exit()scan_wrapper = pygame.key.get_pressed()# 按下空格键加速10倍if scan_wrapper[pygame.K_SPACE]:scale_ratio = speedup_ratioelse:scale_ratio = speedup_ratio / speedup_ratio# 根据 "A" 和 "D" 按键来设置偏航速率变量if scan_wrapper[pygame.K_a] or scan_wrapper[pygame.K_d]:yaw_rate = (scan_wrapper[pygame.K_d] - scan_wrapper[pygame.K_a]) * scale_ratio * vehicle_yaw_rate# 根据 "UP" 和 "DOWN" 按键来设置pitch轴速度变量(NED坐标系,x为机头向前)if scan_wrapper[pygame.K_UP] or scan_wrapper[pygame.K_DOWN]:velocity_x = (scan_wrapper[pygame.K_UP] - scan_wrapper[pygame.K_DOWN]) * scale_ratio# 根据 "LEFT" 和 "RIGHT" 按键来设置roll轴速度变量(NED坐标系,y为正右方)if scan_wrapper[pygame.K_LEFT] or scan_wrapper[pygame.K_RIGHT]:velocity_y = -(scan_wrapper[pygame.K_LEFT] - scan_wrapper[pygame.K_RIGHT]) * scale_ratio# 根据 "W" 和 "S" 按键来设置z轴速度变量(NED坐标系,z轴向上为负)if scan_wrapper[pygame.K_w] or scan_wrapper[pygame.K_s]:velocity_z = -(scan_wrapper[pygame.K_w] - scan_wrapper[pygame.K_s]) * scale_ratio# print(f": Expectation gesture: {velocity_x}, {velocity_y}, {velocity_z}, {yaw_rate}")# 设置速度控制以及设置偏航控制AirSim_client.moveByVelocityBodyFrameAsync(vx=velocity_x, vy=velocity_y, vz=velocity_z, duration=1,yaw_mode=airsim.YawMode(True, yaw_or_rate=yaw_rate),vehicle_name=vehicle_name)temp_image1 = AirSim_client.simGetImage("0", image_types["scene"], vehicle_name=vehicle_name)image1 = cv2.imdecode(airsim.string_to_uint8_array(temp_image1), cv2.IMREAD_COLOR)cv2.imwrite("/home/yehuo/python_learning/AirSim_learning/screen4/visual1.png", image1)# 利用pygame库加载保存的第一视角图像,screen_image1 = pygame.image.load("/home/yehuo/python_learning/AirSim_learning/screen4/visual1.png")# 图像坐标系,左上角为(0, 0),在此放置图片screen.blit(screen_image1, (0, 0))pygame.display.flip()pygame.display.update()temp_image2 = AirSim_client.simGetImage("0", image_types["Infrared"], vehicle_name=vehicle_name)image2 = cv2.imdecode(airsim.string_to_uint8_array(temp_image2), cv2.IMREAD_COLOR)cv2.imwrite("/home/yehuo/python_learning/AirSim_learning/screen4/visual2.png", image2)# 利用pygame库加载保存的第一视角图像,screen_image2 = pygame.image.load("/home/yehuo/python_learning/AirSim_learning/screen4/visual2.png")# 图像坐标系,左上角为(0, 0),在此放置图片screen.blit(screen_image2, (272, 0))pygame.display.flip()pygame.display.update()temp_image3 = AirSim_client.simGetImage("0", image_types["segmentation"], vehicle_name=vehicle_name)image3 = cv2.imdecode(airsim.string_to_uint8_array(temp_image3), cv2.IMREAD_COLOR)cv2.imwrite("/home/yehuo/python_learning/AirSim_learning/screen4/visual3.png", image3)# 利用pygame库加载保存的第一视角图像,screen_image3 = pygame.image.load("/home/yehuo/python_learning/AirSim_learning/screen4/visual3.png")# 图像坐标系,左上角为(0, 0),在此放置图片screen.blit(screen_image3, (544, 0))pygame.display.flip()pygame.display.update()if scan_wrapper[pygame.K_ESCAPE]:pygame.quit()sys.exit()